Quantifying Uncertainty with Markov Chain Monte Carlo Sampling¶
Benjamin Pope
University of Queensland
# This is going to be an interactive lecture using Jupyter!
# So let's import things!
import numpy as np
from astropy.table import Table
import matplotlib.pyplot as plt
import emcee
import chainconsumer
from chainconsumer import ChainConsumer, Chain
Hubble's Original Data¶
Here are some distances from Edwin Hubble's 1929 paper discovering the expansion of the universe.
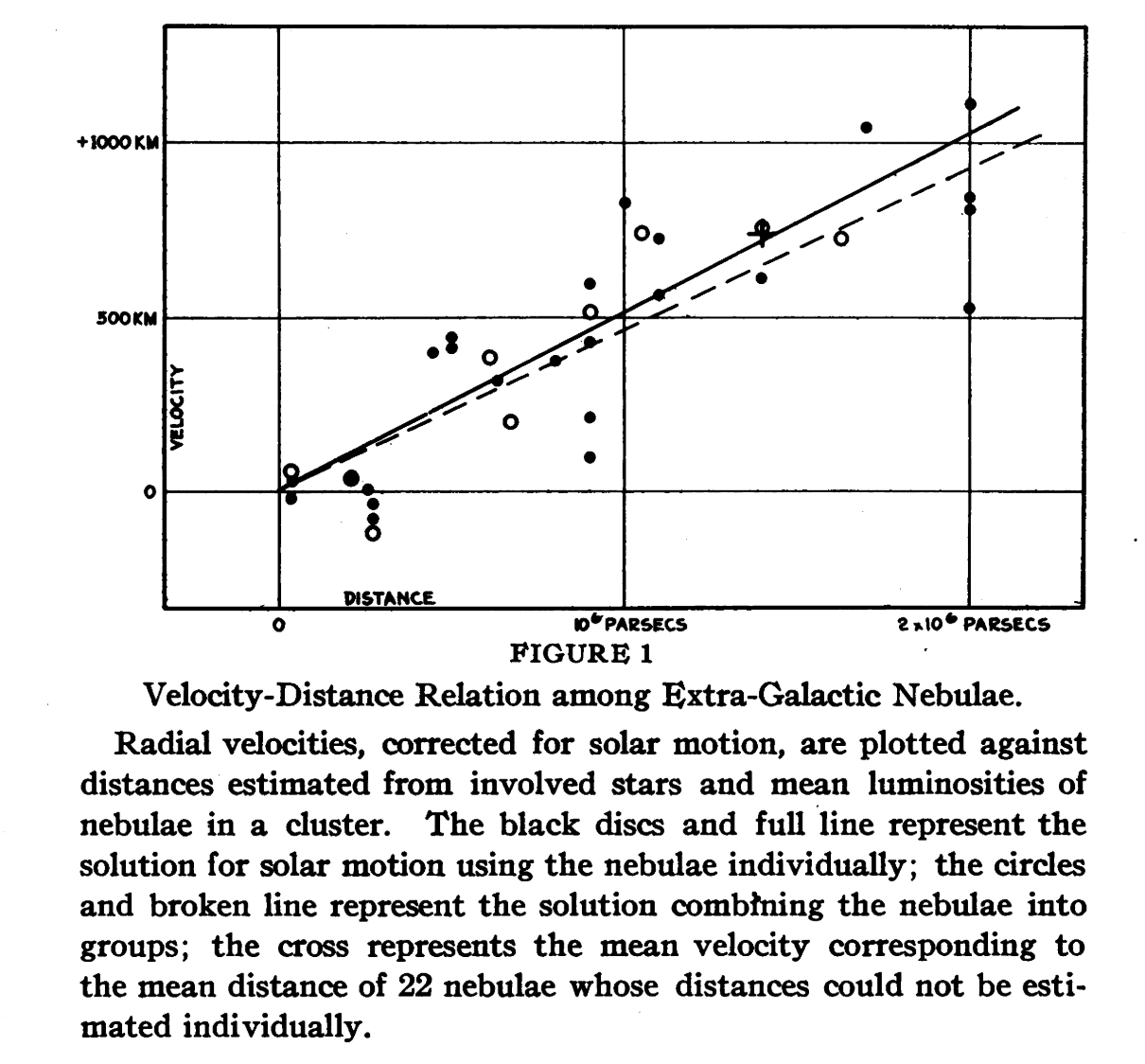
In this lecture, we're going to learn how to fit a model to data like these - and to quantify their uncertainty.
# Load and plot Hubble original data
data = Table.read('../data/hubble.txt', format='ascii')
d, v = data['r'], data['v']
d_err = 0.1
plt.errorbar(d,v,xerr=d_err,fmt='o',color='k')
plt.xlabel('Distance (Mpc)')
plt.ylabel('RV (km/s)');

In physics we gather data through experiment and observation; and do theoretical work to calculate how the outcomes of experiments depend on parameters of their models.
The job of data analysts in physics is to connect the two, solving the inverse problem to infer parameters of a theory from empirical data - and it is usually just as important to quantify the uncertainty on these parameters as to just find a best fitting model.
The most common way to do this is with a Markov Chain Monte Carlo algorithm, which gives us a set of samples drawn from this probability distribution.
In this lecture I will discuss the theory and the surprising history behind the now-ubiquitous MCMC, and illustrate this with an interactive session fitting Hubble's original discovery of the expanding universe with a simple model in Python.
My favourite review paper on this is Hogg & Foreman-Mackey, 2017, Data analysis recipes: Using Markov Chain Monte Carlo.
What do we mean by Monte Carlo methods?¶
Stan Ulam¶
Metropolis-Hastings Algorithm¶
Arianna Rosenbluth¶

Theory¶
Ergodicity: A Markov chain has a limiting distribution if it is
- Irreducible: All states can be reached from other states
- Aperiodic: Does not have a period of repeat
- Positive recurrent: Expected to return (close to) any state in a finite number of steps
Will converge to the true distribution if ergodic and has
Detailed balance: Probability of transition forwards and backwards are the same
Metropolis-Hastings Rules¶
The original MCMC implementation is not necessarily what you will use - but it is a great illustration.
You have a point in your parameter space.
state = 5. # some value!
Now draw a random number from a distribution you can sample from - this is your proposal distribution. Add it to your state. This could just be
proposal = state + stepsize*np.random.randn()
Now calculate the likelihoods:
likelihood_before = 10**loglike(state)
likelihood_after = 10**loglike(proposal)
Then you have the Metropolis-Hastings acceptance rule for detailed balance:
if likelihood_after > likelihood before:
state = proposal
else:
# draw a random number in (0,1)
prob = np.random.rand()
if prob > likelihood_before/likelihood_after:
state = proposal
else:
state = state
- emcee: user-friendly, simple, works well
So let's do MCMC!¶
# first define priors
def lnprior(H0):
# prior probability
if 0 < H0 < 1000:
return 0.0
return -np.inf
def model(H0, v):
# forward model
return v/H0
def lnlike(H0, v, d, d_err):
# log-likelihood function
return -0.5 * np.sum((d-model(H0,v))**2 / d_err**2)
def lnprob(theta, v, d, d_err):
# log probability = log prior + log likelihood
H0 = theta
lp = lnprior(H0)
if not np.isfinite(lp):
return -np.inf
return lp + lnlike(H0, v, d, d_err)
# sample with emcee
ndim, nwalkers = 1, 100
pos = 500 + np.random.randn(nwalkers, ndim)
sampler = emcee.EnsembleSampler(nwalkers, ndim, lnprob, args=(v, d, d_err))
burnin = sampler.run_mcmc(pos, 500, progress=True)
sampler.reset()
sampler.run_mcmc(burnin, 1000, progress=True);
100%|████████████████████████████████████████| 500/500 [00:01<00:00, 279.06it/s] 100%|██████████████████████████████████████| 1000/1000 [00:03<00:00, 272.69it/s]
# plot history - should look like noise
samples = sampler.get_chain(flat=True)
chain = Chain.from_emcee(sampler, ['H0'], "an emcee chain", discard=200, thin=2, color="indigo")
consumer = ChainConsumer().add_chain(chain)
fig = consumer.plotter.plot_walks(plot_weights=False);

# plot posterior histogram - so far only one variable
fig = consumer.plotter.plot();

# plot posterior predictive model
inds = np.random.choice(np.arange(samples.shape[0]), 50)
ds = np.linspace(0, 2.3, 100)
for ind in inds:
H0 = samples[ind,0]
v_model = H0*ds
plt.plot(ds, v_model, 'g-', alpha=0.05)
plt.errorbar(d, v, xerr=d_err, fmt='.', capsize=2,color='k')
plt.xlim(0, ds.max())
plt.xlabel('Distance (Mpc)')
plt.ylabel('Velocity (km/s)');

Now let's do the Pantheon dataset!¶
This is a large curated catalogue of modern supernova cosmology data.
We'll only look in the local universe, where we don't have to solve the full FRW equations.
# load Pantheon Plus dataset
ddir = '../data/'
fname = 'Pantheon.dat'
data = Table.read(ddir+fname, format='ascii')
# read in the Pantheon Plus data
z = data['zCMB']
z_err = data['zCMBERR']
mb = data['MU_SH0ES'] # distance modulus
mb_err = data['MU_SH0ES_ERR_DIAG']
cut = (z > 0.02) & (z < 0.06) & (z_err < 0.005)
z = z[cut]
z_err = z_err[cut]
mb = mb[cut]
mb_err = mb_err[cut]
# distance
d = 10**((mb-25)/5) # Mpc
d_err = d * np.log(10) * mb_err / 5
# plot Pantheon Plus data
plt.errorbar(z, d, yerr=d_err, xerr=z_err, fmt='.', capsize=2,color='k')
zs = np.linspace(0, 0.0602, 100)
# Hubble's law
# H0 = 75 km/s/Mpc
# z to velocity
c = 299792.458 # km/s
# Relativistic doppler shift
vs = c * (zs / (1 + zs))
plt.xlim(0.018,0.0602)
plt.xlabel('Redshift')
plt.ylabel('Distance (Mpc)');

def lnprior(H0):
if 0 < H0 < 200:
return 0.0
return -np.inf
def model(H0,intercept,z):
# now we are including an intercept, ie y = mx + b
v = c * (z / (1 + z))
return v/H0 + intercept
def lnlike(H0, intercept, z, d, d_err):
return -0.5 * np.sum((d-model(H0,intercept,z))**2 / d_err**2)
def lnprob(theta, z, d, d_err):
H0, intercept = theta
lp = lnprior(H0)
if not np.isfinite(lp):
return -np.inf
return lp + lnlike(H0,intercept, z, d, d_err)
# sample with emcee
ndim, nwalkers = 2, 100 # notice we have 2 params
pos = np.array([68,0]) + 1e-4 * np.random.randn(100, 2)
sampler = emcee.EnsembleSampler(nwalkers, ndim, lnprob, args=(z, d, d_err))
burnin = sampler.run_mcmc(pos, 500, progress=True)
sampler.reset()
sampler.run_mcmc(burnin, 1000, progress=True);
100%|████████████████████████████████████████| 500/500 [00:02<00:00, 179.63it/s] 100%|██████████████████████████████████████| 1000/1000 [00:05<00:00, 180.42it/s]
# chainconsumer
samples = sampler.get_chain(flat=True)
chain = Chain.from_emcee(sampler, ['H0','intercept'], "an emcee chain", discard=200, thin=2, color="indigo")
consumer = ChainConsumer().add_chain(chain)
fig = consumer.plotter.plot_walks(plot_weights=False);

# this is a corner plot, illustrating covariance
fig = consumer.plotter.plot();

# plot posterior predictive model
# choose values
inds = np.random.choice(np.arange(samples.shape[0]), 50)
zs = np.linspace(0, 0.061, 100)
for ind in inds:
H0 = samples[ind,0]
intercept = samples[ind,1]
d_model = model(H0, intercept, zs)
plt.plot(zs, d_model, 'g-', alpha=0.05)
plt.errorbar(z, d, yerr=d_err, xerr=z_err, fmt='.', capsize=2,color='k')
plt.xlim(0.0,0.0602);

Higher dimensional models - covariance¶
def lnprior(H0):
if 0 < H0 < 200:
return 0.0
return -np.inf
def model(H0,quadratic,intercept,z):
v = c * (z / (1 + z))
return v/H0 + intercept + v**2 * quadratic
def lnlike(H0, quadratic, intercept, z, d, d_err):
return -0.5 * np.sum((d-model(H0,quadratic,intercept,z))**2 / d_err**2)
def lnprob(theta, z, d, d_err):
H0, quadratic, intercept = theta
lp = lnprior(H0)
if not np.isfinite(lp):
return -np.inf
return lp + lnlike(H0,quadratic,intercept, z, d, d_err)
# sample with emcee
ndim, nwalkers = 3, 100
pos = np.array([68,0,0]) + 1e-4 * np.random.randn(100, 3)
sampler = emcee.EnsembleSampler(nwalkers, ndim, lnprob, args=(z, d, d_err))
burnin = sampler.run_mcmc(pos, 500, progress=True)
sampler.reset()
sampler.run_mcmc(burnin, 1000, progress=True);
100%|████████████████████████████████████████| 500/500 [00:03<00:00, 143.26it/s] 100%|██████████████████████████████████████| 1000/1000 [00:07<00:00, 141.64it/s]
# chainconsumer
samples = sampler.get_chain(flat=True)
chain = Chain.from_emcee(sampler, ['H0','quadratic','intercept'], "an emcee chain", discard=200, thin=2, color="indigo")
consumer = ChainConsumer().add_chain(chain)
fig = consumer.plotter.plot_walks(plot_weights=False);

# we now have a higher dimensional corner plot
fig = consumer.plotter.plot(figsize=(7.0,7.0));

# plot posterior predictive model
inds = np.random.choice(np.arange(samples.shape[0]), 50)
zs = np.linspace(0, 0.061, 100)
for ind in inds:
H0 = samples[ind,0]
quadratic = samples[ind,1]
intercept = samples[ind,2]
d_model = model(H0, quadratic, intercept, zs)
plt.plot(zs, d_model, 'g-', alpha=0.05)
plt.errorbar(z, d, yerr=d_err, xerr=z_err, fmt='.', capsize=2,color='k')
plt.xlim(0.0,0.0602);
plt.xlabel('Redshift')
plt.ylabel('Radial Velocity (km/s)');

MCMC Next Steps¶
Or: How to become a power user
Many datasets with shared parameters? Use Hierarchical Bayes!
- Best to use a probabilistic programming language like numpyro to specify this!
def model(X,Y,E):
m = numpyro.sample("m", numpyro.distributions.Uniform(-5,5)) # prior on m
c = numpyro.sample("c", numpyro.distributions.Uniform(-10,10)) # Prior on c
with numpyro.plate('data', len(X)):
y_model = m*X + c
numpyro.sample('y', numpyro.distributions.Normal(y_model,E), obs = Y)
High dimensions:
- ordinary samplers undetectably fail
- gradient based samplers like Hamiltonian Monte Carlo succeed!
- if you want gradients - use Jax to write your forward model!